MPU6050簡介
關(guān)于MPU6050通信,可以先看文章淺談I2C和SPI通信協(xié)議。一、MPU6050簡介MPU-60X0 是全球首例9 軸運動處理傳感器。它集成了3 軸MEMS
關(guān)于MPU6050通信,可以先看文章
淺談I2C和SPI通信協(xié)議。
一、MPU6050簡介
MPU-60X0 是全球首例9 軸運動處理傳感器。它集成了3 軸MEMS 陀螺儀,3 軸MEMS加速度計,以及一個可擴展的數(shù)字運動處理器DMP(Digital Motion Processor),可用I2C接口連接一個第三方的數(shù)字傳感器,比如磁力計。擴展之后就可以通過其I2C 或SPI 接口輸出一個9 軸的信號(SPI 接口僅在MPU-6000 可用)。MPU-60X0 也可以通過其I2C 接口連接非慣性的數(shù)字傳感器,比如壓力傳感器。
MPU-60X0 對陀螺儀和加速度計分別用了三個16 位的ADC(0~65535),將其測量的模擬量轉(zhuǎn)化為可輸出的數(shù)字量。為了精確跟蹤快速和慢速的運動,傳感器的測量范圍都是用戶可控的,陀螺儀可測范圍為±250,±500,±1000,±2000°/秒(dps),加速度計可測范圍為±2,±4,±8,±16g。
芯片尺寸4×4×0.9mm,采用QFN 封裝(無引線方形封裝),可承受最大10000g 的沖擊,并有可編程的低通濾波器。
MPU6050的內(nèi)部框圖如下圖所示:
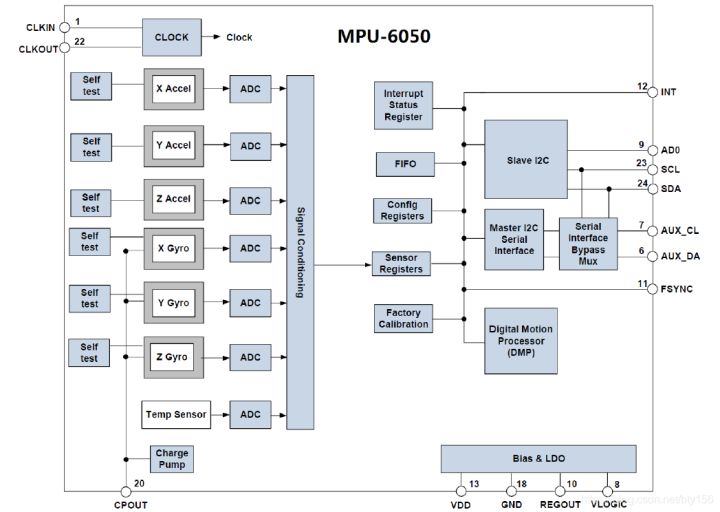
其中,需要了解的引腳有:SCL和 SDA是連接MCU的 IIC接口,MCU通過這個IIC 接口來控制MPU6050,另外還有一個 IIC 接口:AUX_CL和AUX_DA ,這個接口可用來連外部從設(shè)備比如磁力計,這樣就可以組成一個九軸傳感器。VLOGIC是IO口電壓,該引腳最低可以到1.8V電壓, 我們一般直接連VDD即可。AD0是從IIC 接口(接 MCU)的地址控制引腳,該引腳控制的是IIC 地址的最低位。如果接 GND ,則 MPU6050的IIC地址是:0X68,如果接VDD,則是0X69。需要注意的是:這里的地址0x68和0x69是不包含用于數(shù)據(jù)傳輸?shù)淖畹臀坏模虼瞬⒉皇前宋粩?shù)據(jù),如0x68表示的是110 1000,0x69表示的則是110 1001,通常最低位用于表示IIC主機的讀取數(shù)據(jù)/寫數(shù)據(jù)模式。self test為自檢,自檢的作用是可用來測試傳感器的機械和電氣結(jié)構(gòu)。也就是說通過自檢來測試芯片是否損壞。自檢啟動后,電路會使傳感器工作并且產(chǎn)生輸出信號。關(guān)于自檢的具體說明,官方芯片手冊里有詳細描述。如下:
- Gyroscope Self-Test
When self-test is activated, the on-board electronics will actuate the appropriate sensor. This actuation will move the sensor’s proof masses over a distance equivalent to a pre-defined Coriolis force. This proof mass displacement results in a change in the sensor output, which is reflected in the output signal. The output signal is used to observe the self-test response.
The self-test response is defined as follows:
Self-test response = Sensor output with self-test enabled – Sensor output without self-test enabledThe self-test limits for each gyroscope axis is provided in the electrical characteristics tables of the MPU-6000/MPU-6050 Product Specification document. When the value of the self-test response is within the min/max limits of the product specification, the part has passed self test. When the self-test response exceeds the min/max values specified in the document, the part is deemed to have failed self-test. - Accelerometer Self-Test
When self-test is activated, the on-board electronics will actuate the appropriate sensor. This actuation simulates an external force. The actuated sensor, in turn, will produce a corresponding output signal. The output signal is used to observe the self-test response.
The self-test response is defined as follows:
Self-test response = Sensor output with self-test enabled – Sensor output without self-test enabledThe self-test limits for each accelerometer axis is provided in the electrical characteristics tables of the MPU-6000/MPU-6050 Product Specification document. When the value of the self-test response is within the min/max limits of the product specification, the part has passed self test. When the self-test response exceeds the min/max values specified in the document, the part is deemed to have failed self-test.
二、MPU6050相關(guān)寄存器
MPU6050官方的寄存器手冊上共介紹了40個寄存器的內(nèi)容和功能,在此我只選取一些常用的和重要的寄存器作為了解。
1.采樣分頻寄存器 Sample Rate Divider

說明:該寄存器指定陀螺儀輸出速率的分頻器,用于為MPU-60X0生成采樣速率。
傳感器寄存器輸出,F(xiàn)IFO輸出,DMP采樣,運動檢測,靜止檢測和自由落體檢測都基于這個采樣頻率。
采樣頻率=陀螺儀輸出頻率/(1+SMPLRT_DIV)
當(dāng) DLPF(數(shù)字低通濾波器,見寄存器Configuration)禁用時(DLPF_CFG=0 or 7),陀螺輸出頻率=8kHz;當(dāng) DLPF 使能,陀螺儀輸出頻率=1KHz。注意:加速度計輸出頻率為 1KHz。這意味著,當(dāng)采樣頻率大于1KHZ時,同個加速度計采樣得到的數(shù)據(jù),可能不止一次輸出到FIFO、DMP、傳感器寄存器。
2.配置寄存器 Configuration

說明:該寄存器為陀螺儀和加速度計配置外部幀同步(FSYNC) 管腳的采樣和數(shù)字低通濾波(DLPF)設(shè)置。
其中,數(shù)字低通濾波器DLPF由DLPF_CFG配置。根據(jù)下表所示的DLPF_CFG值對加速度計和陀螺儀進行濾波。
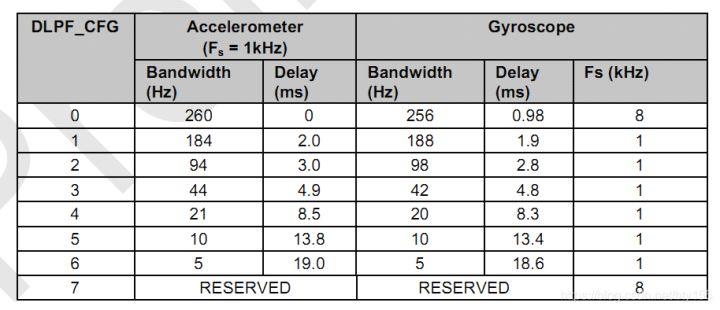
其中,F(xiàn)S為陀螺儀輸出頻率。SMPLRT_DIV由預(yù)設(shè)定的采樣頻率根據(jù)上述的公式計算得出。一般情況下,DPLF濾波頻率為采樣頻率的一半,如設(shè)定采樣頻率為50Hz,由表可知當(dāng)FS為1kHz,SMPLRT_DIV的值為1000/50-1=19。
3.陀螺儀配置寄存器 Gyroscope Configuration

說明:該寄存器是用來觸發(fā)陀螺儀自檢和配置陀螺儀的滿量程范圍。
其中,XG_ST、YG_ST、ZG_ST分別用來設(shè)置陀螺儀X軸、Y軸、Z軸自檢,置0則不觸發(fā)自檢。FS_SEL[1:0]用于設(shè)置陀螺儀的滿量程,如下表:
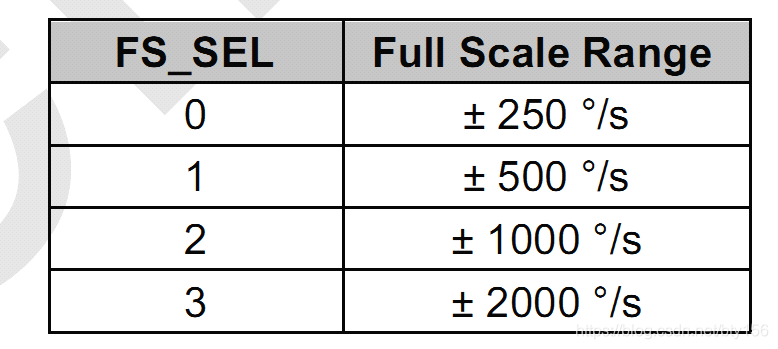
我們一般設(shè)置為3,即滿量程為±2000°/s,由于采用16位ADC即0-65536,則靈敏度G=65536/4000=16.4LSB/(°/s),LSB表示最低有效位,即1°/s對應(yīng)的數(shù)字量為16.4。最終即可將陀螺儀輸出的數(shù)字量數(shù)據(jù)轉(zhuǎn)化為角速度。
4.加速度計配置寄存器 Accelerometer Configuration

說明:該寄存器是用來觸發(fā)加速度計自檢和配置加速度計的滿量程范圍。同時這個寄存器也可以用于配置數(shù)字高通濾波器(DHPF)。
其中,XA_ST、YA_ST、ZA_ST分別用來設(shè)置加速度計X軸、Y軸、Z軸自檢,置0則不觸發(fā)自檢。AFS_SEL[1:0]用于選擇加速度計的滿量程范圍,如下表:
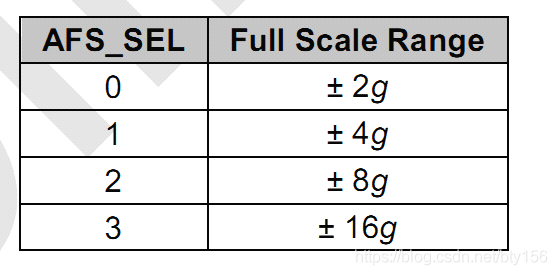
我們一般設(shè)置為0,即滿量程為±2g,由于采用16位ADC即0-65536,則靈敏度G=65536/4=16384LSB/(g),LSB表示最低有效位,即1g對應(yīng)的數(shù)字量為16384。最終即可將加速度計輸出的數(shù)字量數(shù)據(jù)轉(zhuǎn)化為加速度。
5.加速度計測量值寄存器 Accelerometer Measurements
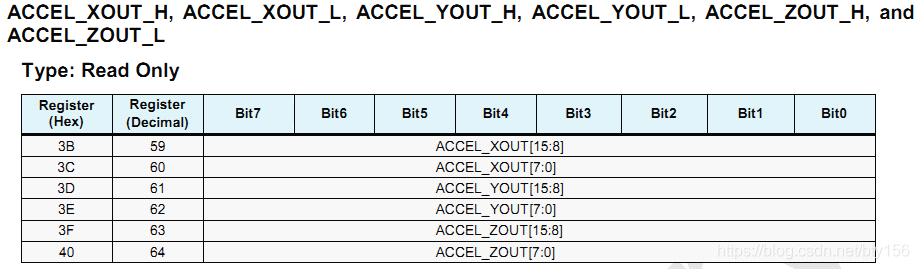
說明:該寄存器存儲最近加速度計的測量值。加速度計根據(jù)采樣頻率(由采樣分頻寄存器寄存器設(shè)定 )寫入到這些寄存器。即采樣頻率為50Hz,寫入數(shù)據(jù)的時間間隔為0.02s。加速度計測量值寄存器和溫度測量值寄存器,陀螺儀測量值寄存器,外部傳感器數(shù)據(jù)寄存器都是由兩組寄存器構(gòu)成:一個內(nèi)部寄存器集和一個用于用戶讀取的寄存器集。
加速度計傳感器的內(nèi)部寄存器集合里的數(shù)據(jù)根據(jù)采樣頻率更新。以此同時,每當(dāng)串行接口處于閑置狀態(tài),面向用戶的讀取寄存器集合會復(fù)制內(nèi)部寄存器集合的數(shù)據(jù)值。這保證了突發(fā)讀取時傳感器寄存器可以讀到相同的采樣時刻的測量值。需要注意的是,如果沒有突發(fā)讀取,則用戶負責(zé)通過檢查數(shù)據(jù)就緒中斷(Data Ready interrupt)來確保瞬時的一組單字節(jié)讀取對應(yīng)于單字節(jié)的采樣數(shù)據(jù)。
參數(shù):
ACCEL_XOUT :
由 2部分組成的 16位數(shù)值存儲最近X 軸加速度計的測量值。
ACCEL_YOUT :
由 2部分組成的 16位數(shù)值存儲最近Y 軸加速度計的測量值。
ACCEL_ZOUT :由 2部分組成的 16位數(shù)值存儲最近Z 軸加速度計的測量值。
6.陀螺儀測量值寄存器 Gyroscope Measurements
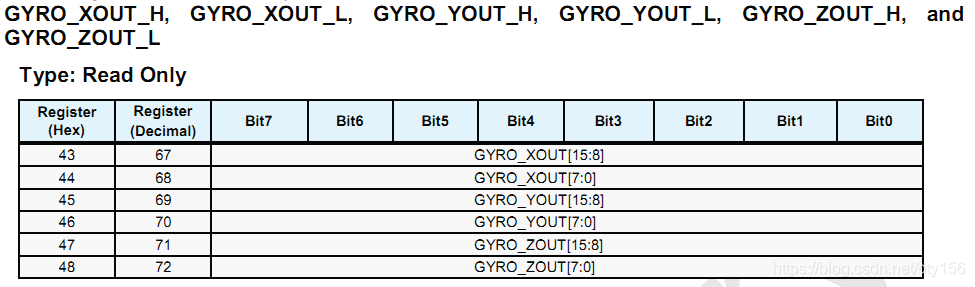
說明:該寄存器存儲最近加陀螺儀的測量值。大致構(gòu)成與加速度計測量值寄存器相同,此處便不做敘述。參數(shù)分別為:GYRO_XOUT 、GYRO_YOUT 、GYRO_ZOUT 。
7.電源管理寄存器1 Power Management 1

說明:該寄存器允許用戶配置電源模式和時鐘源,還提供了復(fù)位整個設(shè)備和禁用溫度傳感器的位。當(dāng)置SLEEP位為1時,MPU-60X0 可以進入低功耗睡眠模式。當(dāng)SLEEP位禁用且 CYCLE位置 1時,MPU-60X0進入循環(huán)模式(CycleMode)。在循環(huán)模式下,設(shè)備在休眠模式和喚醒之間循環(huán),以LP_WAKE_CTRL(由電源管理2寄存器配置)確定的速率從active sensors(此處不知如何翻譯)獲取單個數(shù)據(jù)樣本。
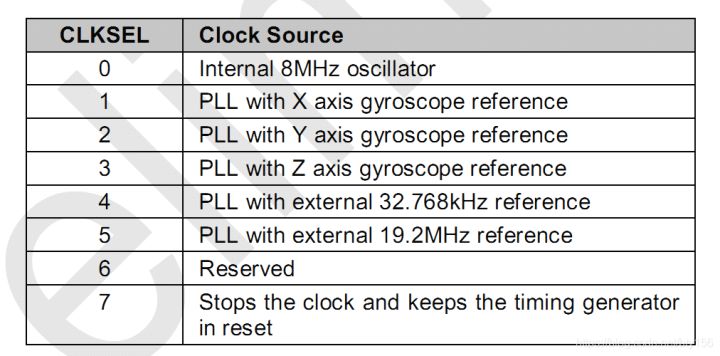
該寄存器的最低三位用于設(shè)置系統(tǒng)的時鐘源選擇,默認值是0(內(nèi)部8M RC振蕩),不過一般設(shè)置為1,選擇x軸陀螺PLL作為時鐘源,以獲得更高精度的時鐘。同時,使能角速度傳感器和加速度傳感器,這兩個操作通過電源管理寄存器2配置,設(shè)置對應(yīng)位為0即可開啟。
附英文手冊原文片段:Upon power up, the MPU-60X0 clock source defaults to
the internal oscillator. However, it is highly recommended that the device be configured to use one of the gyroscopes (or an ext ernal clock source) as the clock reference for improved stability.
其他參數(shù):
DEVICE_RESET
該位置 1,重啟內(nèi)部寄存器到默認值。復(fù)位完成后該位自動清0。
TEMP_DIS該位置 1,禁用溫度傳感器。
8.電源管理寄存器2 Power Management 2

說明:該寄存器允許用戶在加速度計低功耗模式下配置喚醒頻率。也允許用戶讓加速度計和陀螺儀的個別軸進入待機模式。
只讓MPU-60X0的加速度計進入低功耗模式的步驟如下:
1.置 CYCLE位為 1
2.置 SLEEP位為 1
3.置 TEMP_DIS位為 1
4.置 STBY_XG,STBY_YG,STBY_ZG位為 1
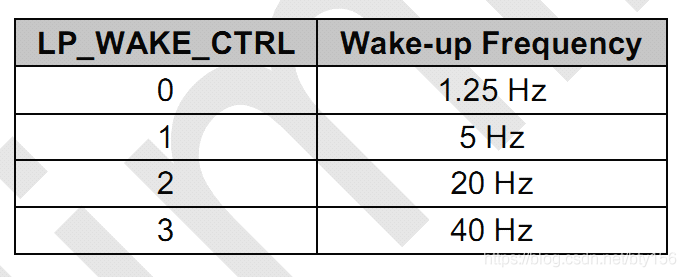
在這種模式下,設(shè)備會關(guān)閉除了主 I2C接口外其他所有設(shè)備,加速度計只在固定的間隔喚醒并測量一次。喚醒的頻率可以通過配置 LP_WAKE_CTRL實現(xiàn)如下:
參數(shù):
LP_WAKE_CTRL :
2位無符號數(shù)值。指定加速度計在低功耗模式下的喚醒頻率。
STBY_XA :
該位置 1,加速度計的 X軸進入待機模式。
STBY_YA :
該位置 1,加速度計的 Y軸進入待機模式。
STBY_ZA :
該位置 1,加速度計的 Z軸進入待機模式。
STBY_XG :
該位置 1,陀螺儀的 X軸進入待機模式。
STBY_YG :
該位置 1,陀螺儀的 Y軸進入待機模式。
STBY_ZG :該位置 1,陀螺儀的 Z軸進入待機模式。
總結(jié)
到此,關(guān)于MPU6050官方手冊里與我用到的有關(guān)的內(nèi)容已經(jīng)整理完了。由于很多英文看不懂,所以參考了很多的中文資料綜合起來,參考的資料有:
上一篇:負60個了,早點離開吧。
下一篇:種類多樣的鋁型材6060