【虹科案例】虹科脈沖發生器在雷達中的應用
01初級脈沖雷達初級雷達產生照亮目標的信號并接收其回波。根據調制(模擬或數字)和生成信號的不連續性,可以區分不同類型的雷達。最簡
01初級脈沖雷達
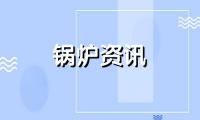
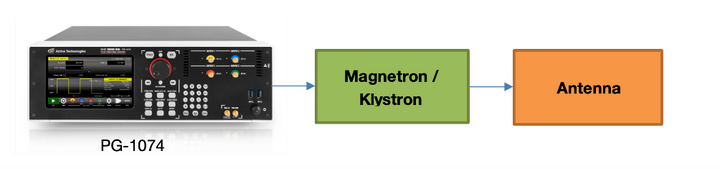
初級雷達產生照亮目標的信號并接收其回波。根據調制(模擬或數字)和生成信號的不連續性,可以區分不同類型的雷達。最簡單的雷達是脈沖雷達,它不使用任何類型的調制,但它在短時間內產生信號并接收目標產生的反射信號的回波響應。
通過這種方式,它可以確定與物體的距離,計算發送信號和接收到的回波之間的飛行時間。 這種架構受到最大范圍和分辨率之間權衡的限制:因此較大的脈沖會增加平均傳輸功率,然后增加最大范圍,但會降低分辨率。出于這個原因,這種類型的雷達在遠程控制中得到應用,主要用于空中交通管制和天氣觀測(尤其是降水)。
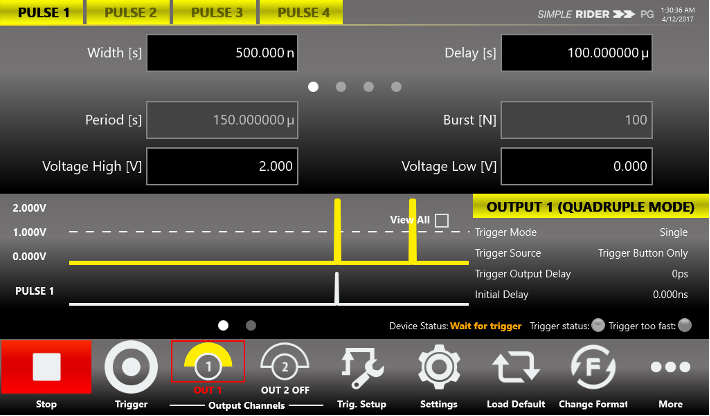
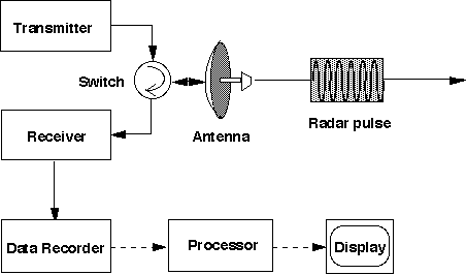
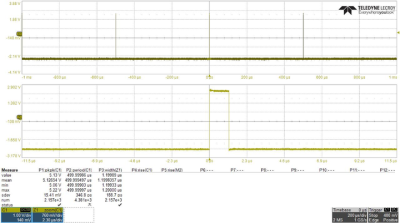
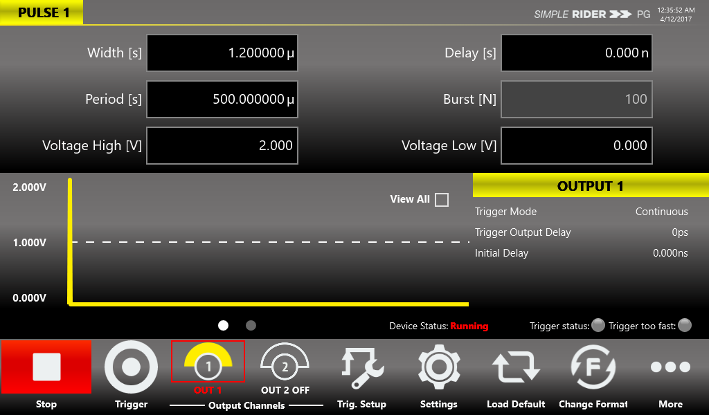
在系統開發過程中,使用脈沖發生器向 RF 調制鏈提供脈沖以測試接收器改變脈沖持續時間的行為是很有用的。Active Technologies Pulse Rider PG-1000 系列脈沖發生器允許使用圖形界面和觸摸屏顯示器輕松創建具有不同脈沖寬度、重復率和振幅的脈沖。遵循此解決方案,可以節省開發脈沖系統的時間,并將精力集中在雷達設計和測試目標上。
02.二次雷達
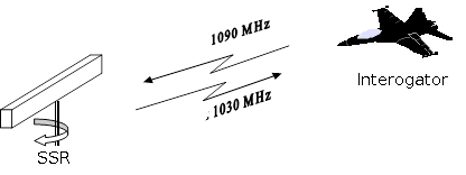
二次雷達是一種用于空中交通管制的特殊雷達,與飛機應答器協同工作。它使用脈沖代碼詢問應答器并等待響應; 根據傳輸的代碼,它可以請求識別號、海拔高度等。
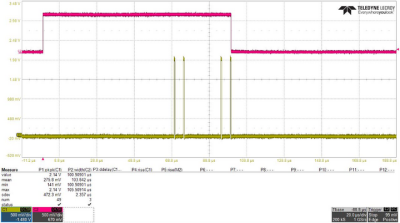
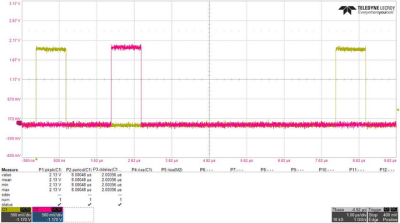
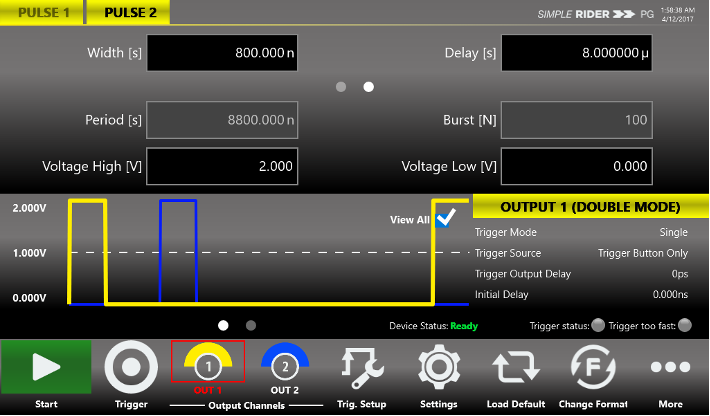
詢問基帶代碼非常簡單,它由 3 個脈沖組成,稱為 P1、P2 和 P3,持續時間固定為 800 ns。第一個脈沖 (P1) 和最后一個 (P3) 由定向天線發射,通過它們之間的距離定義代碼。第二個脈沖 (P2) 以全向方式傳輸,比第一個脈沖延遲 2 μs; 這個特定的脈沖是必要的,因為定向天線發射的次級波瓣可能會擊中其他轉發器,從而導致錯誤的響應和干擾。 轉發器測量脈沖 P1 和脈沖 P2 期間的接收功率,并區分它是由主天線波瓣還是由次級天線波瓣到達,并在第一種情況下發送響應。
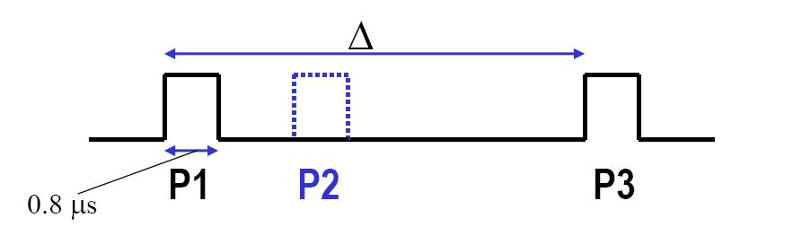
Pulse Rider PG-1000 系列允許產生具有用戶定義的距離和持續時間的雙脈沖 P1 和 P3,它提供 10 ps 的出色時間分辨率。 多個通道的存在非常適合為第二個脈沖 (P2) 提供延遲 2 μs 的第一個脈沖。 低于 25 ps 的抖動可確保通道之間的完美同步。
03.使用脈沖/延遲發生器的多目標模擬
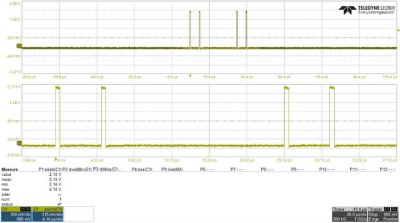
在初級雷達系統中,精制系統測量信號的飛行時間以計算與目標的距離; 它使用以下等式提取距離: Distance(Km)=((DelayTime(sec)/2)*3×10^5 km/s 其中 3×10^5 km/s是光速的近似值。這意味著傳輸信號和接收信號之間的延遲取決于距離。在多個目標的情況下,接收到多個信號,檢測系統必須能夠區分它們。虹科Pulse Rider 脈沖發生器是測試檢測鏈的完美選擇,可縮短開發時間,無需完整的雷達系統和一些目標即可瞄準。
多脈沖模式提供雙脈沖、三脈沖和四脈沖,具有不同的持續時間和觸發輸入信號的延遲,可以重復高達 125 MHz,用于測試檢測系統的實時頻率操作。10 ps 的分辨率和低于 25 ps 的抖動 RMS 提供了計算 RF 鏈預期延遲和模擬分辨率低于厘米的目標檢測所需的精度。